When I read the course title I knew I had to take the class. What respectable hacker could pass up a title like Gizmology? Basically it's a UC Berkeley extension class about basic robotics as applied to "the arts".
During the first class the teacher asked us what we would like to build. As this came with no prior knowledge base we were free to speculate a bit. I said I'd be happy if I could just make something that could crawl across a tabletop, using motors or pneumatics controlled via computer.
It turned out that the second class was cancelled because teacher had a bad cold, so I was free to explore my idea and subsequent places it lead in some depth. Immediately following is an html rendering of what I handed in for my first assignment. Below that I'll append a diary and photos as progress is made on the project.
Chief: "Some people learn through pain and suffering; others through laughter and joy."
Jack: "Oh, and I suppose you're part of the 'laughter and joy' bunch?"
Chief: "Why not?!"
From The Fourth Tower of Inverness by Meatball Fulton
I have in mind three projects; one very basic to begin with, mainly to get a feel for building light and fast and to make something that moves (I'll try to bring bits to class #2). Basically it's a sheetmetal ìtorsoî with pneumatically-driven legs. These legs will propel the "prone" robot along a floor or tabletop, much as a human might lie down and scoot along a smooth floor. I was thinking of adding a pair of nonfunctioning arms and possibly the head from a doll to complete the ensemble. To investigate motor control the head might be made to swivel on a "neck". The tentative title for this device is I've fallen and I can't get up!, heh. At the moment I'm waiting for parts so this one hasn't gotten beyond the fabrication of sheetmetal torso and rudimentary legs.
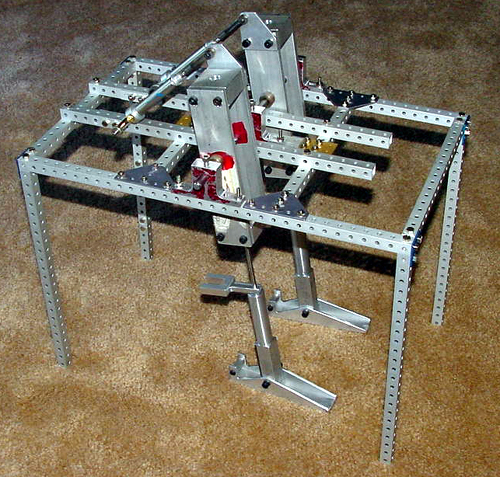
To date I've made the most progress, however, on the second project I'd like to try. It was inspired by something I saw years ago in a cartoon; a little hard to explain, but it will be a framework to support two pneumatically-activated ìlegsî that can retract or extend to just touch the floor. This will be an attempt to make a ìtap dancingî bot that will emphasize computer control of electric and pneumatic systems; two subjects about which I know absolutely nothing.
If ever there was something ripe for robotic parody that automaton-like dancing chorus of girls from Riverdance definitely fits the bill. With the dancing feet attached to an inert torso and dangling arms, a pair of robotic feet attached to a wheeled frame, rolling about a stage, would be perfect. During my days with Battlebots I learned about a method of propulsion using a device called an Omniwheel, which, due to its geometry, allows a single motor to propel it in two axes, without the need for it to be pivoted on the Z axis. By positioning four of these about the base of a robotic vehicle it can be made to travel in straight lines along X and Y axes and it can also be made to rotate or turn while traversing. In other words it can mimic all of the maneuvers one of those zombie-like dancers might make. It would be necessary to control four motors to do this and that would broaden the scope of the challenge beyond pneumatic, to electronic control. I've dubbed this device Patty O'Furniture, as it's sort of Irish and too stupid to come in out of the rain.
It also happens that my friend Bryan Mumford has built a computer-controlled Occarina-playing machine he calls a Puny Tune. Assuming I can get the contraption to work the next phase would be to interface it with this device. The sounds that come out of these little instruments is remarkably "Irish" and would be well suited to the performance. Photos showing current status of this project are appended to the end of this assignment.
The third project I'd like to tackle would be mostly electronic, possibly using stepper motors and cog belt drives. Articulated sections would pivot about one or two axes and positioning would be determined by either computer or manual control. It would be capable of folding into a box-like shape which could roll around, but which could ìunfoldî into an anthropomorphic shape that would be capable of bipedal locomotion. A master-slave interface would be attached to the operator, to achieve nimble and quick reaction to external moving objects. At a rough estimate I figure this thing would weigh upwards of 400 pounds and be quite a mess internally, but it's too neat an idea not to try. I can, indeed, imagine such a project taking years to complete, but if I can master the rudiments in class that would be a great start.
NOTE: I've starting a seperate page wherein resideth photos of circuits I'm building and samples of programming I'm trying to figure out. Here's a link to Circuitry
| Photo #1 Overall view with our gopher-killing demon cat to illustrate scale. |

|
| Photo #2 Close-up of leg and tapping foot mechanism. |

|
| Photo #3 Patty O'Furniture. Each leg/foot combo is actuated by 3 cylinders; the upper ones provide pivoting fore and aft; the central ones provide up/down motion and lower cylinders which have yet to be attached connect the ankles to the backs of the "knees" will provide foot tapping. |
|
NOTES:
For those who have asked the bits I didn't machine were assembled from an erector-type kit called Automat. Dreadful webpage and awful company to deal with, but the kit itself has no faults. Wish I had more of the stuff, but it's pricey... Last time I looked the exchange rate was 2 Marks per Dollar.
Return to Jigs, Fixtures and Shop Hacks
Return to Steamboat Ed Haas
